Projects
Implementing my passions into reality.
Adaptive RL Ensemble Strategy
COMPLETEDOutcome: Adaptive trading strategy that reduces portfolio volatility and improves risk-adjusted returns using an ensemble of reinforcement learning agents.
Tech Stack: Python, PyTorch, PPO, A2C, TD3, Git
Key Constraints: Adaptive allocation across varying market regimes, effective diversification to minimize drawdown, rigorous backtesting against SPY benchmark.
Developed at Queen's AI Club (QMIND), this project implemented an ensemble of Reinforcement Learning agents (PPO, A2C, TD3) to manage portfolio allocation adaptively.
The diversification framework significantly reduced volatility compared to standard benchmarks like SPY buy-and-hold, validated through extensive Sharpe ratio and drawdown analysis.
Autonomous Multi-Agent Robotic Firefighting
COMPLETEDOutcome: Optimized autonomous robot deployment system for wildfire containment, achieving a 30% reduction in cluster convergence time.
Tech Stack: MATLAB, Lloyd's Algorithm, K-Means Clustering, GIS Spatial Analysis Tools
Key Constraints: Real-time dynamic fire hotspot data processing, accurate perimeter modeling, efficient multi-agent coordination.
Course project for APSC 200: Engineering Design and Practice. Course Grade: A+ | Role: Primary Technical Contributor
Driven by an interest in mathematical optimization, I developed a decentralized multi-agent system designed to tackle the unpredictable nature of wildfires. Moving away from rigid, centralized control, I implemented Lloyd’s Algorithm (i. e. K-Means Clustering) to allow a fleet of drones to "self-organize" based on real-time environmental data.
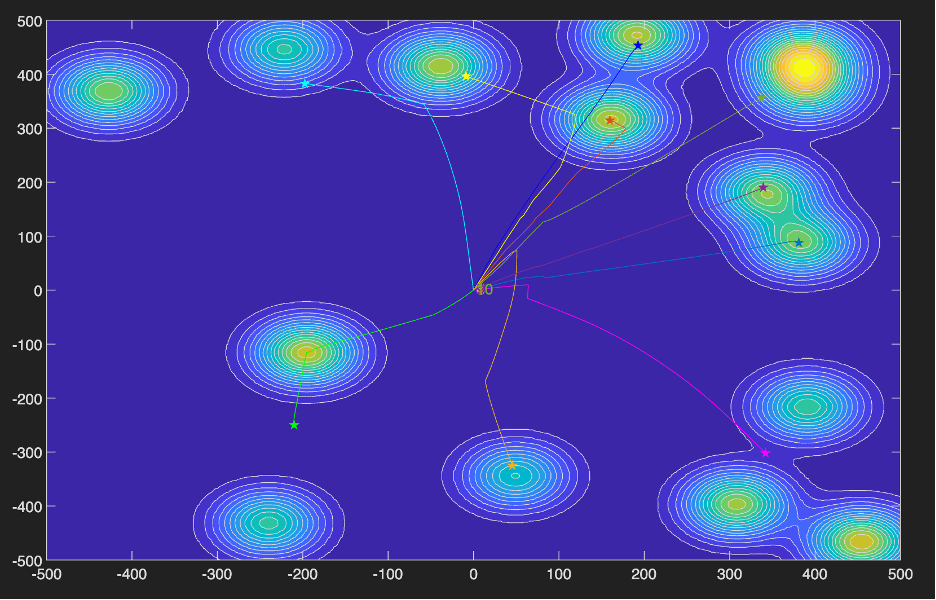
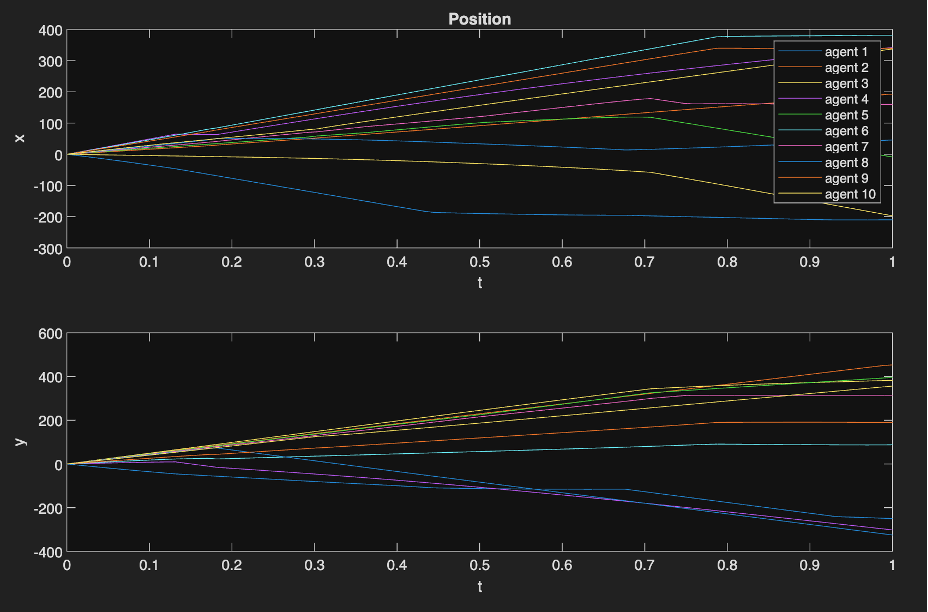
I built a custom simulation environment in MATLAB where I experimented with:
- Dynamic Spatial Partitioning: Using Voronoi regions to ensure agents automatically distribute themselves to the most critical "hotspots" without human intervention.
- Sensor Fusion Logic: Designing an "Observation Set" function that allows agents to weigh environmental density, effectively giving the swarm a collective "vision" of the fire's intensity.
- Robustness & Scalability: Engineering the system to be decentralized so that the failure of one drone doesn't compromise the mission, as neighboring agents autonomously re-calculate and compensate for the gap.